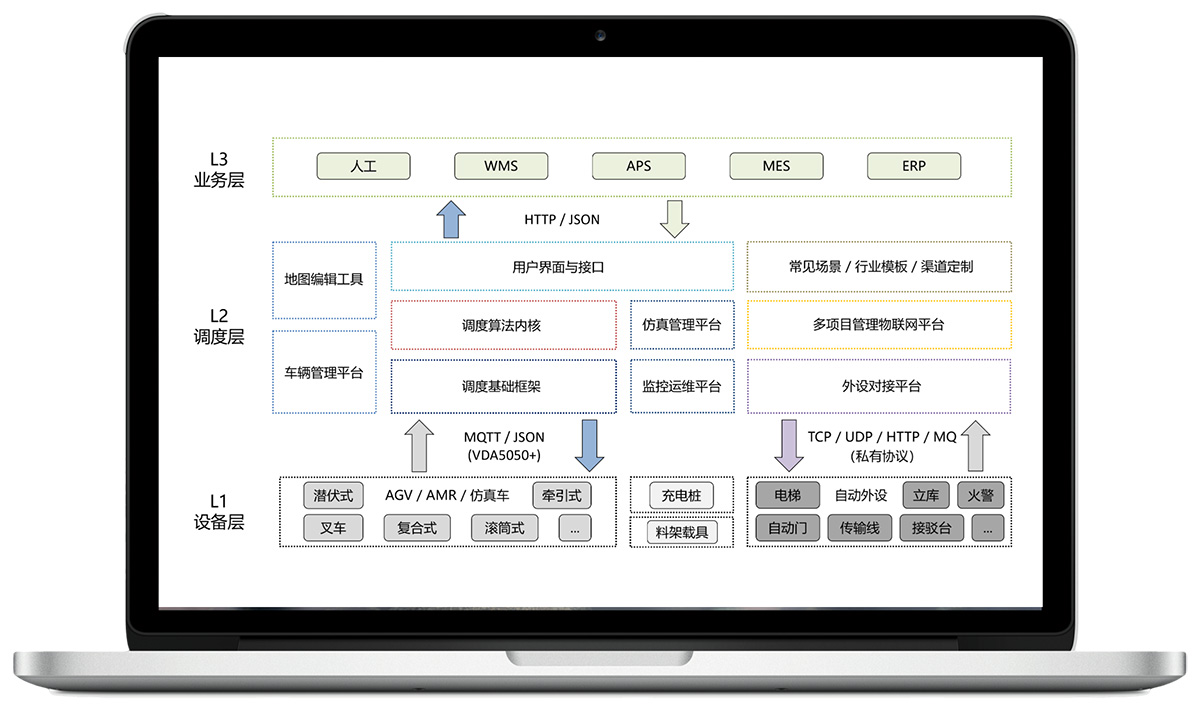
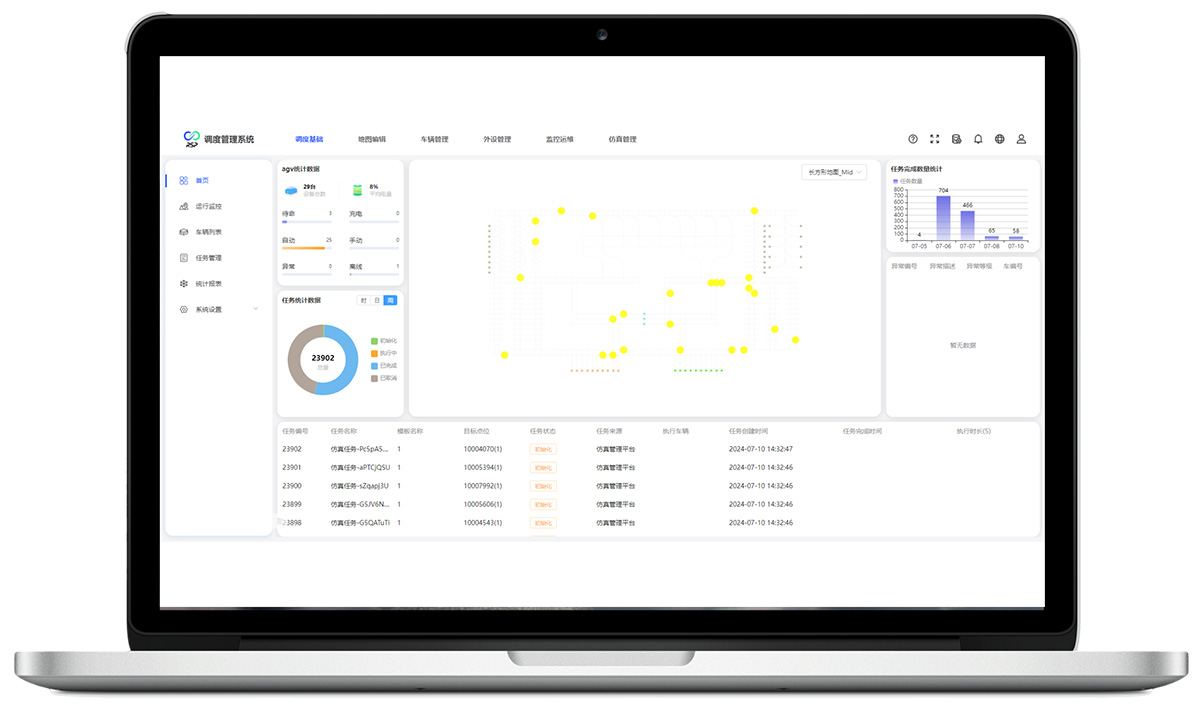
机器人调度系统(Robot Scheduling Platform, RSP)专注于自动化设备和机器人的高效调度和管理。它利用先进的算法来优化机器人的任务分配、路径规划和协同作业,以提高工厂和仓库作业的效率和准确性,并提供友好、直观的用户界面,使操作人员能够轻松监控AGV/AMR、设备、任务和流程。RSP原生支持国际标准协议VDA5050,可以扩展接入第三方厂商的AGV/AMR,支持多品牌多车型混合调度。
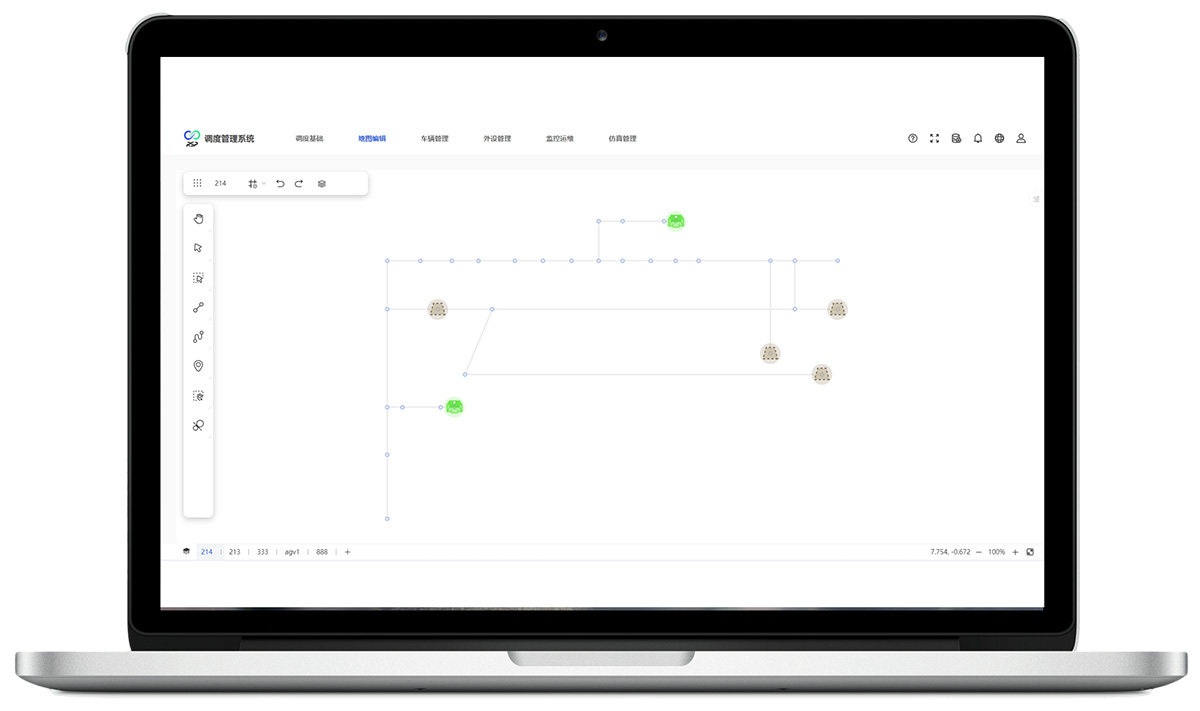
地图编辑工具专门设计用于机器人调度系统(RSP),优化AGV/AMR在工业环境中的导航和任务执行。这一工具的开发着眼于为用户提供一个强大而灵活的平台,允许用户根据实际的生产布局和操作需求,精确地创建、编辑和管理AGV/AMR的运行地图。
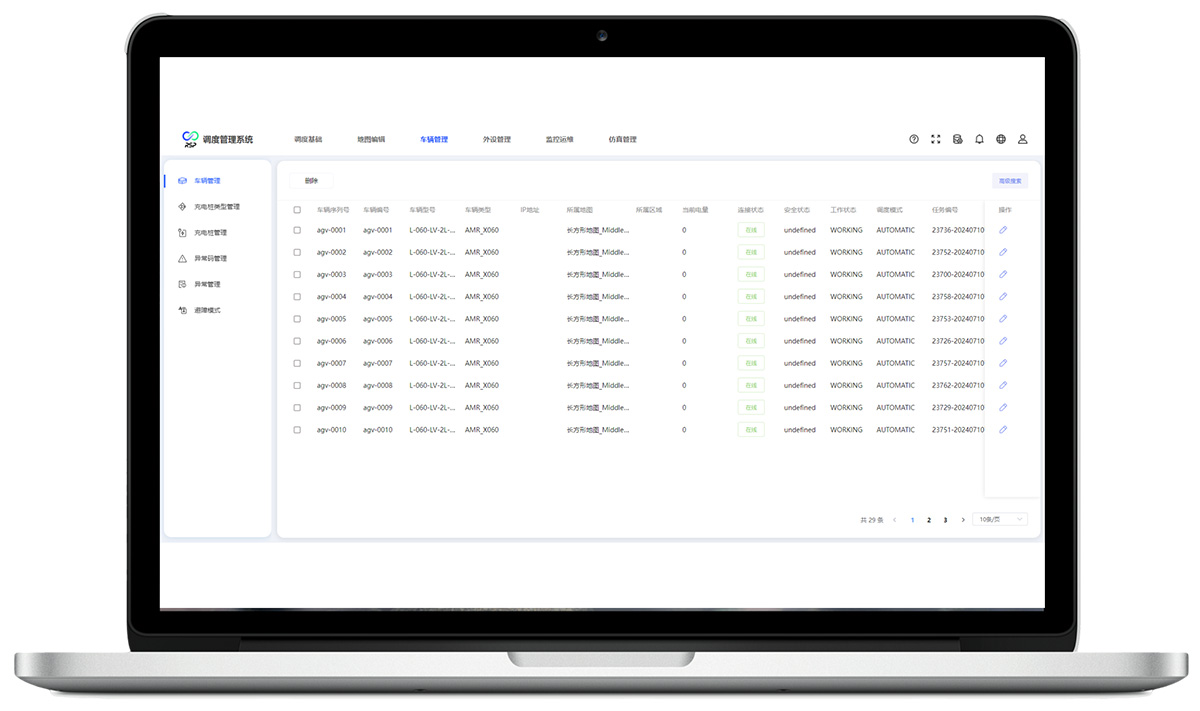
车辆管理平台是一个全面的解决方案,专注于提供实时状态检测、高效异常处理、灵活的配置管理、直观的手动控制界面、无缝的程序更新功能以及智能化的充电桩管理,为AGV/AMR及其他车辆提供优化的运营管理。
调度算法内核作为晓悟智能RSP系统的核心组件,专门设计用于精确优化AGV/AMR在复杂仓储环境中的行驶路径和任务分配。它利用高级路径规划算法,结合详细的仓库地图、货架布局和实时数据分析,为AGV/AMR群体智能规划最短、最高效的行进路线。通过考虑AGV/AMR的当前状态、仓库内货物流动情况和潜在拥堵点,该内核不仅实现了单个AGV/AMR的高效路径规划,还优化了多AGV/AMR之间的协同工作。
调度基础框架是RSP的核心组成部分,承担着从高级调度逻辑到车辆具体执行操作的转换任务,通过智能化的任务拆分、下发和管理策略,实现任务类型的快速识别、优先级的精确评估,以及AGV/AMR状态的实时监控,确保调度子程序的策略和决策能够被车体准确地理解和执行。
仿真管理平台为用户提供了一个强大的虚拟环境,以模拟、分析和优化各种运营流程,允许工程师和系统设计师在投入实际生产前对工厂和仓库布局、业务流程、RSP进行全面的分析和调整,探索不同策略和配置的潜在改进空间。
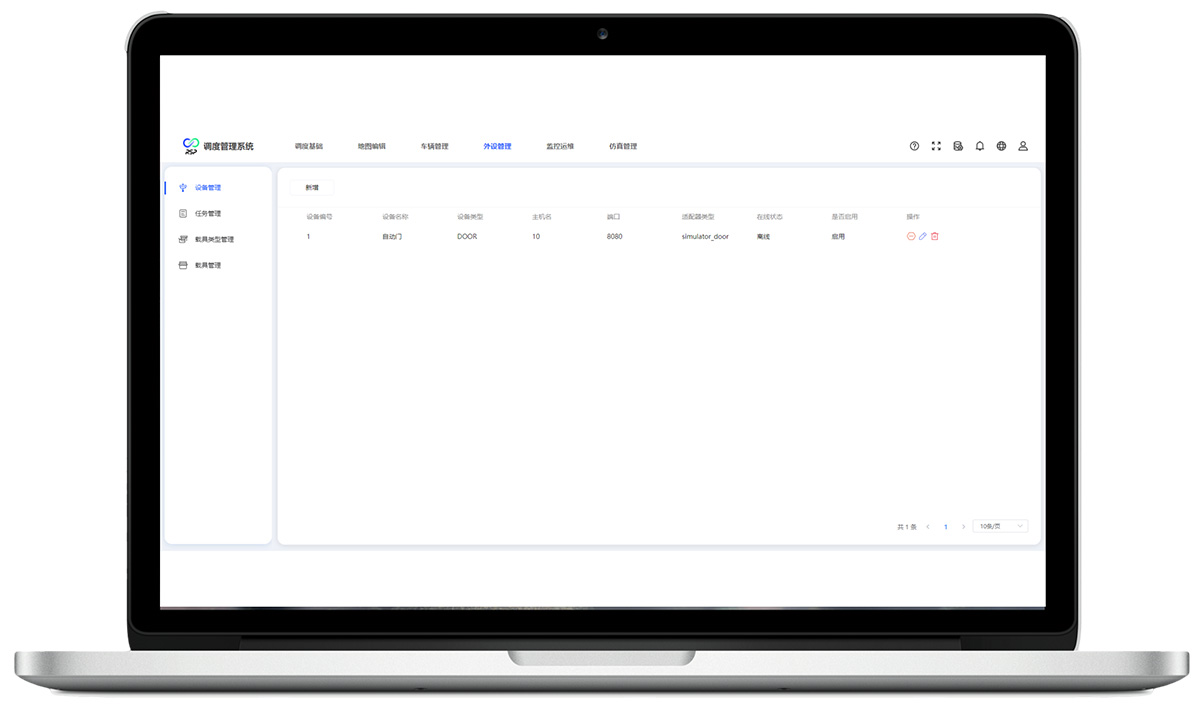
外设对接平台专为实现自动化设备之间的无缝集成、实时监控和智能调度而设计,支持多种工业通信协议。通过集中的管理界面,该平台不仅能够实时监控设备的运行状态、参数和故障信息,还能根据实际需求灵活配置设备参数,及时对设备进行上线或下线操作,有效应对各种生产场景。
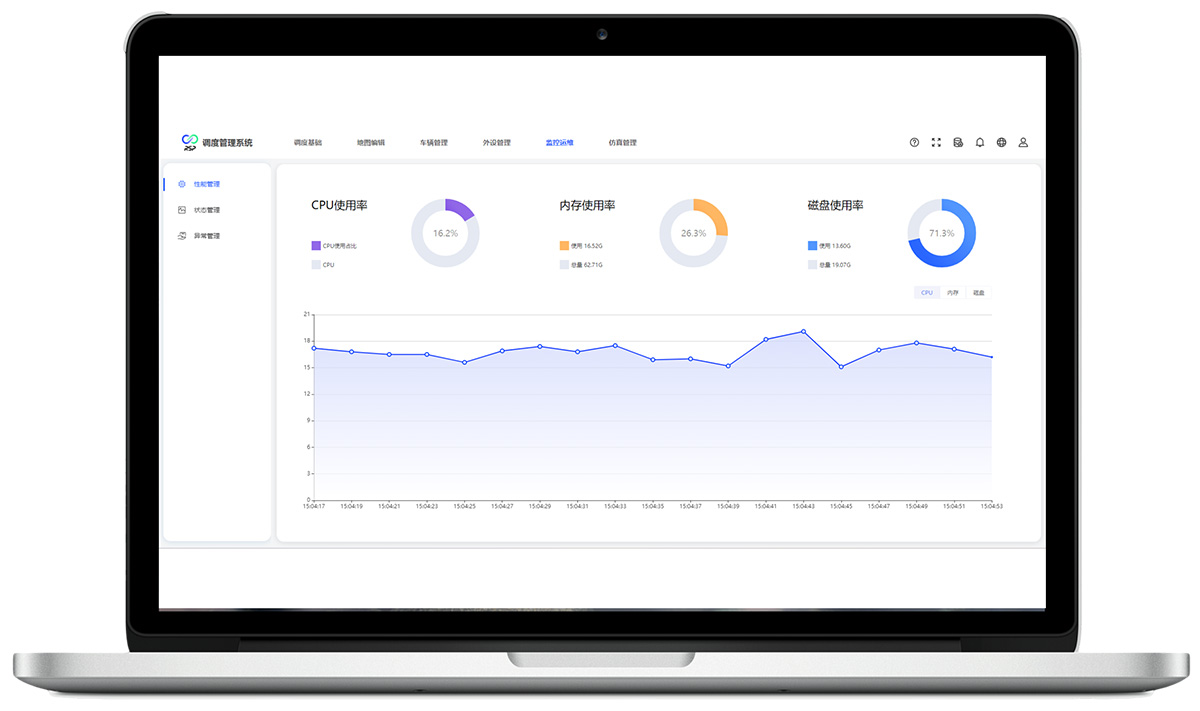
监控运维平台用于实时监控和管理机器人及自动化设备,通过其图形化界面(GUI)提供了一个直观且用户友好的操作环境,允许用户轻松监控和管理机器人及其他自动化设备的实时状态,包括但不限于运行状态、电量、维护需求等。